
热点新闻
仿生机械手
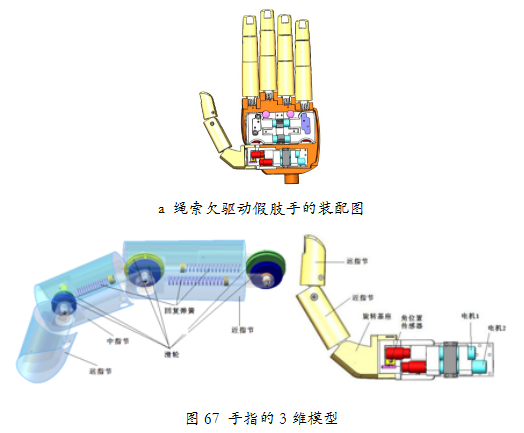
腱-滑轮机构的绳索欠驱动假肢手拆卸与装调
发布时间:2015-09-22 作者: 来源: 浏览次数:
实验概况:绳索欠驱动假肢手采用腱滑轮机构,通过钢丝绳缠绕在每个关节处的驱动滑轮,将驱动力矩传递到每个指节,然后在电机的驱动下拉动绳索,从而实现每个手指节的转动。在手指各指节中安装了回复弹簧,使得手指具有一定的耦合自适应功能,同时传动中采用了蜗轮蜗杆机构,能够实现机构自锁,减少电机堵转。整个假肢手用六个电机驱动,其中两个电机用来驱动拇指运动,其余每个指节用一个电机驱动。为了尽量减小假肢手的尺寸,方便假肢手的安装,我们设计了两个电机箱。两个电机箱一个安装四个电机驱动处拇指外的四个手指,另外一个电机箱装有两个电机,形成整个拇指的驱动机构。
实验目的:巩固和加强机械制图和机械设计课程的理论知识;使学生掌握机械总成、各零部件及其相互连接关系、拆装方法等。
实验功能:通过对绳索欠驱动假肢手的拆卸与装调,使学生掌握看图、读图的方法,掌握从图纸上寻找零件相互关系的方法,理解零部件之间的相互安装关系。
教学效果:巩固和加强学生的机械制图和机械设计课程的理论知识,并使学生掌握机械总成、各零部件及其相互连接关系、拆装方法等。
下一篇:欠驱动假肢手的虚拟主从控制